

Results 1 to 1 of 1
-
July 21st, 2012, 22:11 #1Won Hung Lo




- Join Date
- Apr 2003
- Location
- Nottingham, England
- Age
- 52
- Posts
- 139,516
- Blog Entries
- 3209
- Rep Power
- 50
 Building an autonomous robot from an Xbox 360 controller
Building an autonomous robot from an Xbox 360 controller
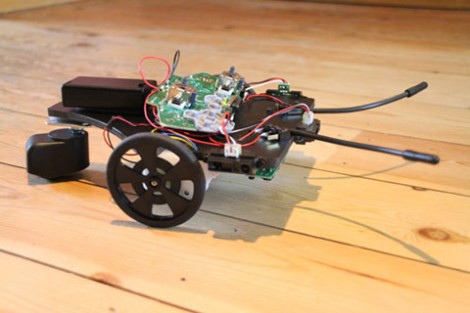
Wow, its amazing what [Carl] was able to build using an Xbox 360 control PCB as the base for his robot. His forum posts just touches the surface of the build, but he linked to a PDF file which has the full details.
This build basically attaches sensors and replacement motors to the controller board and that is it! Some distance sensors are connected to the analog inputs for the left and right trigger. The whiskers use a couple of leaf switches soldered to controller button pads. The motors are geared replacements that use the same connectors as the rumble motors did.
The idea is that the controller is connected to a PC via the wireless radio it has on the PCB. Once the connection is made the PC software can read from all of the sensors and drive the motors accordingly. It would also be really easy to use a single-board solution like the RPi to do away with the need for a remote PC. But this is a fantastic start, and an approach which we had never before considered. See some video of the little guy getting around the room after the break.
http://hackaday.com/2012/07/20/build...60-controller/

 Reply With Quote
Reply With QuoteThread Information
Users Browsing this Thread
There are currently 1 users browsing this thread. (0 members and 1 guests)
Similar Threads
-
Autonomous sniper system combines Xbox 360 controller, .338 rifle for deadly drone ac
By wraggster in forum Xbox News ForumReplies: 0Last Post: April 17th, 2009, 15:33 -
Smartjoy X2: Upgrade of the most popular Xbox Controller USB Adapter
By wraggster in forum Xbox News ForumReplies: 1Last Post: February 9th, 2008, 08:42 -
Any way to import 3d models from an Xbox to PC?
By Distraction in forum DCEmu Gaming & General Discussion ForumReplies: 0Last Post: January 10th, 2006, 21:48 -
Wireless Xbox Controller
By wraggster in forum Xbox News ForumReplies: 0Last Post: November 11th, 2005, 02:13 -
A few Questions from a XBox nOOb
By silverbullet767 in forum Xbox News ForumReplies: 16Last Post: October 23rd, 2004, 20:54

Bookmarks