

Results 1 to 1 of 1
-
September 15th, 2012, 23:42 #1Won Hung Lo




- Join Date
- Apr 2003
- Location
- Nottingham, England
- Age
- 52
- Posts
- 139,514
- Blog Entries
- 3209
- Rep Power
- 50
 Robotic odometry from an optical mouse
Robotic odometry from an optical mouse
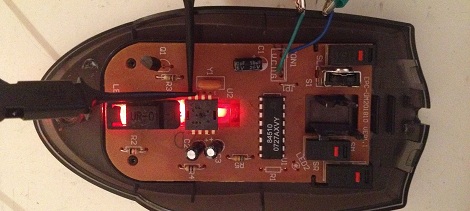
One of the problems future engineers spend a lot of class time solving is the issue of odometry for robots. Its actually kind of hard to tell how far a robot has traveled after applying power to its wheels, but [John] has a pretty nifty solution to this problem. He converted an optical mouse into an odometry sensor, making for a very easy way to tell how far a robot has traveled regardless of wheels slipping or motors stalling.
The build began with a very old PS/2 optical mouse he had lying around. Inside this mouse was a MCS-12085 optical sensor connected to a small, useless microcontroller via a serial interface.
After dremeling the PCB and discarding the microcontroller, [John] was left with an optical sensor that recorded distance at a resolution of 1000dpi. It does this by passing a value from -128 to 127, rolling over every time the sensor moves more than 3.2 mm.
As far as detecting how far a robot has moved, [John] now has the basis for a very simple way to measure odometry without having to deal with wheels slipping or motors stalling. We cant wait to see this operate inside a proper robot.
http://hackaday.com/2012/09/15/robot...optical-mouse/

 Reply With Quote
Reply With QuoteThread Information
Users Browsing this Thread
There are currently 1 users browsing this thread. (0 members and 1 guests)
Similar Threads
-
5 Key Wireless Optical Mouse-Blue
By wraggster in forum PC News ForumReplies: 0Last Post: March 12th, 2008, 20:54 -
Control your Windows computer from your Wii!! Mouse and keyboard.
By wraggster in forum Nintendo News ForumReplies: 2Last Post: October 4th, 2007, 12:30 -
Compaq USB Trackball / Optical Mouse
By wraggster in forum Retro Homebrew, Hosted Releases & Console News ForumReplies: 0Last Post: October 19th, 2006, 17:27 -
Cordless Optical Mouse for Notebooks
By wraggster in forum Retro Homebrew, Hosted Releases & Console News ForumReplies: 0Last Post: August 11th, 2006, 15:56 -
Blaze Optical Mouse
By wraggster in forum Retro Homebrew, Hosted Releases & Console News ForumReplies: 0Last Post: January 10th, 2006, 23:27

Bookmarks